My research focuses on enabling robust, semantic, and actionable spatial intelligence for underwater robots, spanning mapping, perception, and full robotic systems. Please click Details on each project for papers, videos, or code.
Jump to a section
Semantic Mapping & Localization
Building persistent, object-centric spatial representations for long-term autonomy.
Semantic Enhancement for Object SLAM (IROS 2025) Object-centric SLAM enhanced with heterogeneous multimodal large language model agents.
Opti-Acoustic Semantic SLAM (IROS 2024) Multimodal semantic SLAM combining optical and acoustic sensing in underwater environments with unknown objects. 🏆 Best Paper at the IROS 2024 Workshop on Autonomous Robotic Systems in Aquaculture
Semantic Mapping with Confidence Scores (ICRA 2023) Metric-embedding–based semantic mapping with Gaussian Process classification for uncertainty-aware object reasoning in robotic environments.
ROW-SLAM (ICRA 2022) Object-centric semantic SLAM for detecting and localizing crop structures in cluttered, under-canopy environments.
Bathymetry-based Bayesian Localization (JOE 2025) Quantitative evaluation of terrain-aware probabilistic localization for autonomous underwater robots.
Perception
Robust visual perception from data generation and enhancement to detection, identification, and control.

TrashCAN Dataset A large-scale underwater instance segmentation dataset for marine debris, robots, and natural objects. 🌍 Downloaded 30,000+ times by users across 100+ countries

IBURD (ICRA 2025) Image blending for improved underwater robotic detection under severe visual degradation.
Trash VAE (ICRA 2020) Generating realistic synthetic underwater debris data to overcome data scarcity.
Marine Debris Detection (ICRA 2019) End-to-end robotic detection of underwater litter using deep visual detection models.
Diver Identification via Anthropometric Ratios (RA-L 2024) Identifying individual divers using geometric human-body cues for multi-human–robot collaboration.
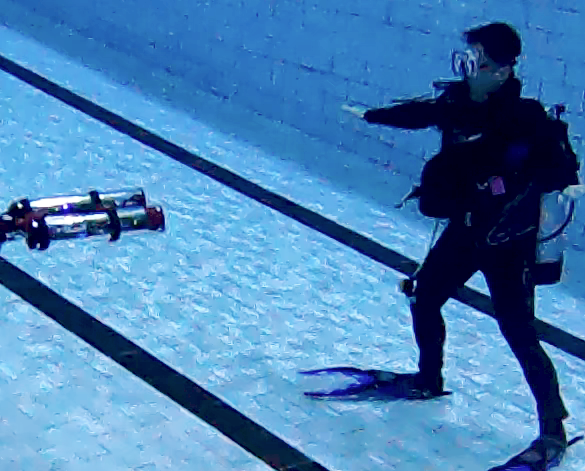
Monocular Diver Detection & Approach (ICRA 2022) Learning human-body-prior-based perception to detect and autonomously approach scuba divers using monocular vision.
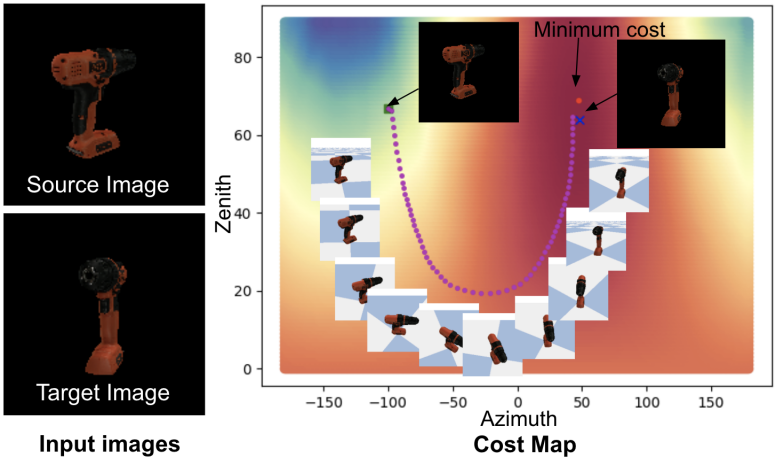
Self-supervised Wide-baseline Visual Servoing (IROS 2022) Learning 3D-equivariant visual servoing policies from self-supervision across wide viewpoint changes.
SOAR (ICRA 2021) Semantically-aware stereo-visual obstacle avoidance integrating instance segmentation with depth reasoning.
Robotic Systems
Designing and deploying open-source robotic systems that enable accessible, reproducible, and field-validated autonomy.
LoCO AUV (IROS 2020) A low-cost, fully open-source autonomous underwater vehicle enabling accessible field robotics research. 🌐 Adopted by universities and research institutions across America, Asia, Europe, and Africa