2026
 |
ReefMapGS: Enabling Large-Scale Underwater Reconstruction by Closing the Loop Between Multimodal SLAM and Gaussian Splatting : D. Yang, J. Hong, J. J. Leonard, Y. Girdhar. Under review. |
|
2025
 |
Semantic Enhancement for Object SLAM with Heterogeneous Multimodal Large Language Model Agents : J. Hong, C. Ran, J. J. Leonard. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hangzhou, China. 2025. |
|
 |
A Quantitative Evaluation of Bathymetry-based Bayesian Localization Methods for Autonomous Underwater Robots : J. Hong, M. Fulton, K. Orpen, K. Barthelemy, K. Berlin, and J. Sattar. IEEE Journal of Oceanic Engineering (JOE), vol. 50, no. 2, pp. 985‑1000, April 2025. |
|
 |
IBURD: Image Blending for Underwater Robotic Detection : J. Hong, S. Singh, J. Sattar. IEEE International Conference on Robotics and Automation (ICRA). Atlanta (GA), USA. 2025. |
|
2024
 |
Opti-Acoustic Semantic SLAM with Unknown Objects in Underwater Environments : K. Singh, J. Hong, N. R. Rypkema, J. J. Leonard. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit (MI), USA. 2024. |
|
 |
Diver Identification Using Anthropometric Data Ratios for Underwater Multi-Human-Robot Collaboration : J. Hong, S. Enan, J. Sattar. IEEE Robotics and Automation Letters (RA-L). 2024. |
|
2023
 |
Semantic Mapping with Confidence Scores through Metric Embeddings and Gaussian Process Classification : J. Hong, S. Garg, V. Isler. IEEE International Conference on Robotics and Automation (ICRA). London, UK. 2023. |
|
2022
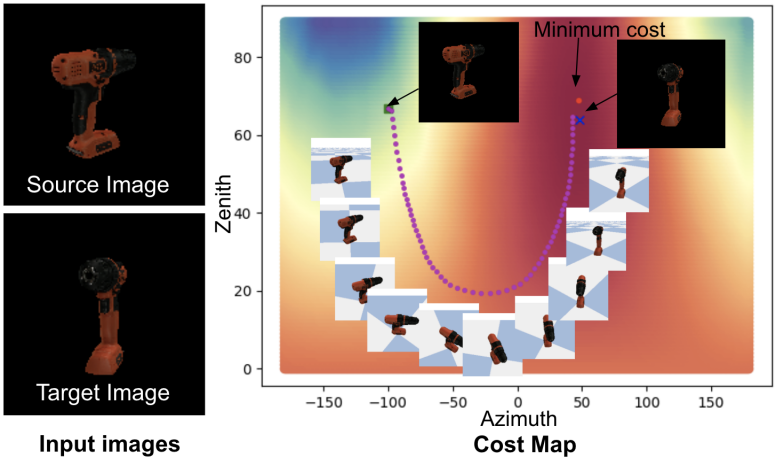 |
Self-supervised Wide Baseline Visual Servoing via 3D Equivariance : J. Huh, J. Hong, S. Garg, H.S. Park, V. Isler. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Kyoto, Japan. 2022. |
|
 |
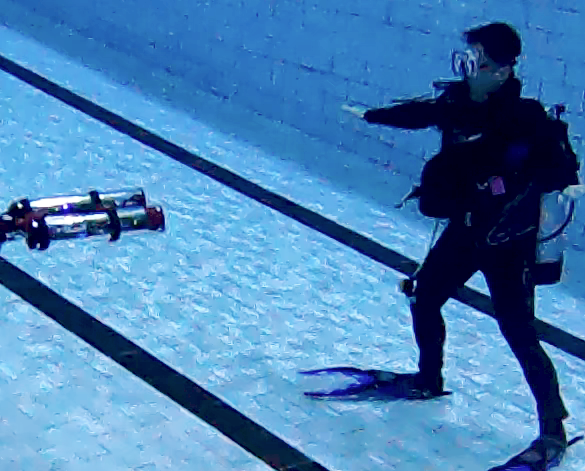
Using Monocular Vision and Human Body Priors for AUVs to Autonomously Approach Divers : M. Fulton*, J. Hong*, and J. Sattar. IEEE International Conference on Robotics and Automation (ICRA) Philadelphia (PA), USA. 2022.*The authors contributed equally to this work. |
|
 |
ROW-SLAM: Under-Canopy Cornfield Semantic SLAM : J. Yuan, J. Hong, J. Sattar, and V. Isler. IEEE International Conference on Robotics and Automation (ICRA) Philadelphia (PA), USA. 2022. |
|
2021
 |
Semantically-Aware Strategies for Stereo-Visual Robotic Obstacle Avoidance : J. Hong, K. de Langis, C. Wyeth, C. Walaszek, and J. Sattar. IEEE International Conference on Robotics and Automation (ICRA) Xi’an, China (Virtual). 2021. |
|
2020
 |
Design and Experiments with LoCO AUV: A Low Cost Open-Source Autonomous Underwater Vehicle : C. Edge, S. S. Enan, M. Fulton, J. Hong, J. Mo, K. Barthelemy, H. Bashaw, B. Kallevig, C. Knutson, K. Orpen, and J. Sattar. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, NV USA. 2020. The authors in alphabetical order. |
|
 |
Power-On-and-Go Capabilities for a Low-Cost Modular Autonomous Underwater Vehicle : C. Edge, S. S. Enan, M. Fulton, J. Hong, J. Mo, and J. Sattar. Robotics: Science and Systems (RSS) 2020 Workshop on Power On and Go Robots. Virtual RSS 2020. The authors in alphabetical order. |
|
 |
A Generative Approach Towards Improved Robotic Detection of Marine Litter : J. Hong, M. Fulton, J. Sattar. IEEE International Conference on Robotics and Automation (ICRA). Paris, France. 2020. |
|
2019
 |
Person-following by autonomous robots: A categorical overview : M. J. Islam, J. Hong, and J. Sattar. The International Journal of Robotics Research (IJRR) Impact Factor: 6.134 |
|
 |
Robotic detection of marine litter using deep visual detection models : M. Fulton*, J. Hong*, M. J. Islam, J. Sattar. IEEE International Conference on Robotics and Automation (ICRA). Montreal, Canada. 2019.*The authors contributed equally to this work. |
|